
Fetullah Atas
I know about Machine Learning
I love Robotics
Computer vision
SLAM
I am passionate Roboticist
I am a highly motivated and passionate Researcher with a special interest for autonomous robots and its applications. Experienced on developing software for various robotics platforms(mobile, arms) ranging from research to industrial level. Strong understanding and software developmental skills in robot perception, scene understanding and planning. Fluent in C++ and ROS1/ ROS2 and Python. At work I am very organized and efficient. I like to plan, prioritize and execute tasks with decision. I hate wasting time. I need to have long-term goals to maintain a global vision of projects. But I divide the tasks into very simple parts to finally obtain a complex result.
Favourite quotes
"In theory, theory and practice are the same, in practice they are not (Yogi Berra)."

Knowledge
Computer vision
Mono/stereo camera calibration. Image features detection and matching. Stereo triangulation. Color enhancement.
SLAM
SLAM algorithms for robot localization and 3D reconstruction. Loop closing detection, geometric validation and integration. Mono/stereo visual odometry.
Robot localization
Sensor fusion. Extended Kalman filters. Integration of accelerations, velocities and global positioning for a centimeter precise navigation.
Sensor drivers
Sensors drivers for ROS. Serial, TCP/IP and USB communications.
Some Facts
Scientific contributions
2Working Hours
2,256Awards Won
0Coffee Consumed
23Resume
3 Years of Experience in Robotic project development
Education
2020 - 2024
PhD
Norwegian University of Life Sciences, NorwayThesis Topic; Motion Planning, Control for Outdoor Navigation
2017 - 2019
Master Degree in Mechatronics
National Taipei University of Technology, TaiwanThesis Topic; A New Real-Time 3D Detection Framework Based on Instance Segmentation
2016- 2017
Master Degree in Mechatronics Engineering (Partially Completed)
Istanbul Technical University, TurkeyMajor classes from; Computer vision, Robotics, Control theory.
2011 - 2015
Bachelor Degree Mechatronics Engineering
Istanbul Gelsim University, TurkeySoftware && Tools
ROS 1 /ROS 2
Linux + command line + ssh
OpenCV
Google Cartographer, SLAM
Machine Learning and Computer Vision
Coding Skills
C++
Python
Experience
(08/2019 - Ongoing)
Robotic Software Engineer
Chicony Electronics Co., Taipei Taiwan
● --------------------------------------PART1---------------------------------------
● Responsible for development of robotic project, with the aim of achieving vision
based auto pick-place of various objects
● Developed QT based UI for interacting with robot
● Trained and validated various CNN architectures(MaskRCNN, YOLO) for custom
object detection in 2D and 3D
● Contributed to a few open source ROS packages in order to include new models of
industrial robots
● Rewrote a custom calibration stack(ROS stacks) for dierent types of camera
calibration tasks(Hand-Eye, Eye-Base, Camera intrinsic calib), with an automated
fashion
● Integrated various robot models(Staubli, Fanuc) with Gazebo simulator, for testing
and validating software in advance
● Authored close to 10 ROS packages in context of the project
● Single-handedly achieved vision based pick and place that can be ported to any ROS
supported 6DOF robots
● Watch a quick demo; https://www.youtube.com/watch?v=BOb7jN4NzDo
● --------------------------------------PART2---------------------------------------
● Started the RD process of building and simulating ROS2 based AGV
● Built a primitive version of dierential drive Mobile robot that autonomously
navigates in pre-built map(by google cartographer), uses the new Navigation2 by ROS2
(05/2018 - 03/2019)
Perception Engineer
Mindtronic AI, Taipei Taiwan
● Responsible for autonomous vehicle and its sensor simulation under dierent
simulators such as Gazebo and CARLA
● Took a part to design and apply the perception architecture of autonomous vehicle
● Integrated results of perception into vector map ,which was an unied
representation of real world inside the system
● Wrote much simpler and ecient Cost-map which was used for local path planning,
obstacle avoidance and other Grid Cell based perception algorithms
● Achieved obstacle detection and obstacle localization in unknown environments
using Lidar data
● Developed C++ code for Lidar based Object detection and tracking for autonomous
driving with Kalman lter
● Actively used PCL and OpenCV for segmentation, clustering and other
manipulations on Lidar Point Clouds and Images
● Implemented several Gazebo models and world plugins including intelligent agents
radar sensor plugin
(05/2018 - 03/2019)
Graduate Researcher at Machine Vision Lab
National Taipei University of Technology, Taipei Taiwan
● CNNs for object detection, mainly focused on urban areas for autonomous driving
● 2D and 3D SLAM of indoor environments using Google Cartographer for mobile robot
navigation with ROS navigation stack
● Robot path planing and observing using IMU and 2D Lidar
● Sensor fusion for autonomous vehicle perception, especially Lidar and camera
● Sensor calibration tasks, Lidar and 3D camera(ZED) calibration
● 3D scene understanding using 3D Lidar point clouds and RGB image
Projects
Updates coming Soon...

Stereo Camera Calibration With Lidar
A Ros Package to access manipulate and process Raw KITTI dataset. In this Project there is some sensor fusion, and some other perception tasks are being done. We KITTI datset to evaluate 3D detection pipeline
Media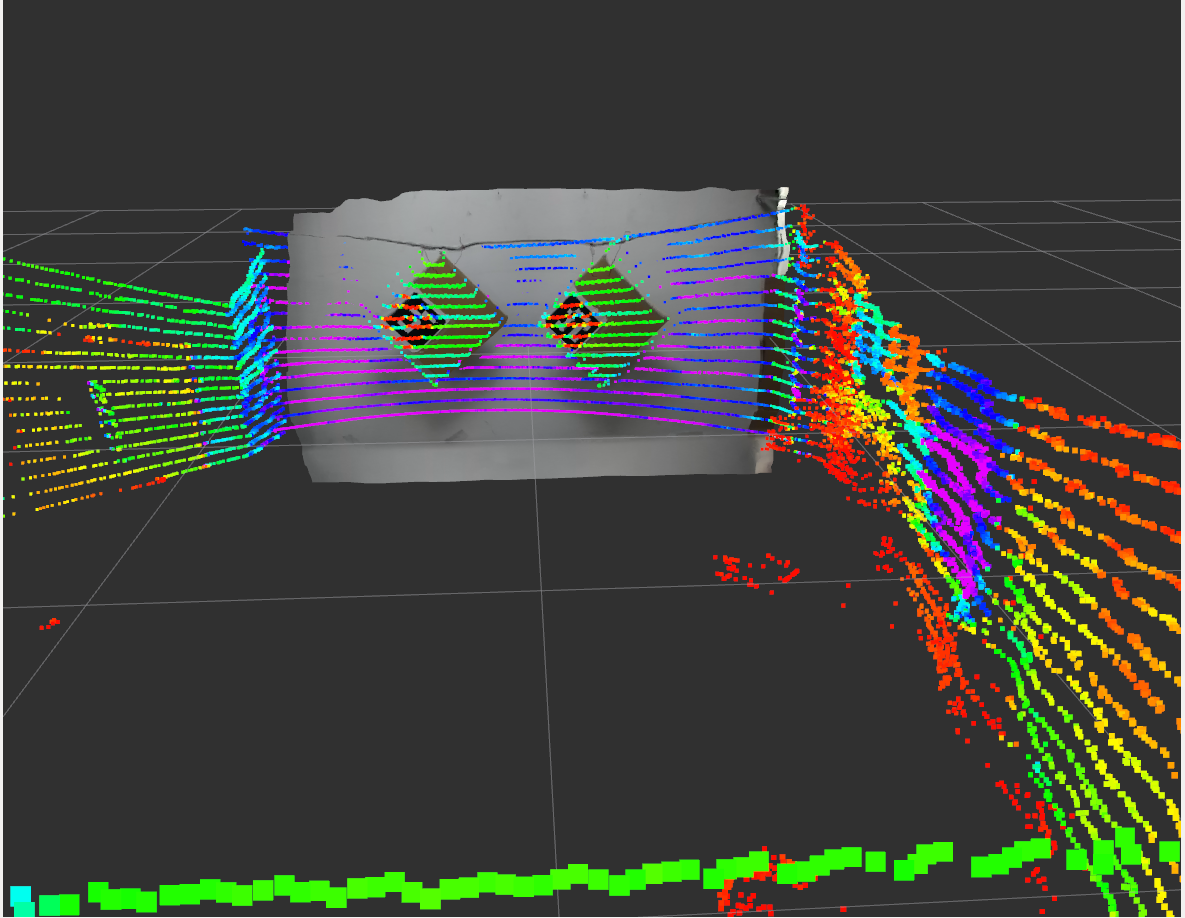
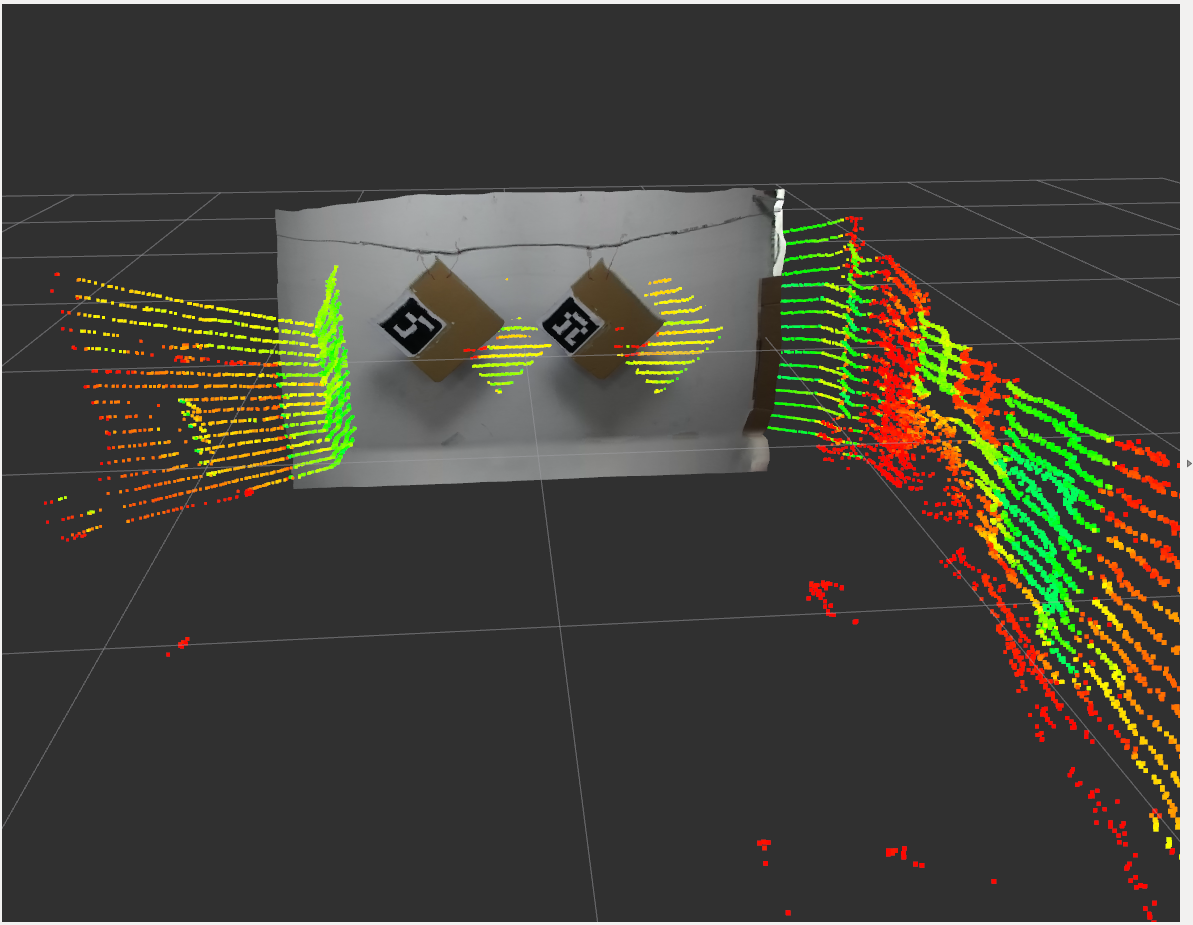

Stereo Camera Calibration With Lidar
More Coming Soon
MediaContact
Get in Touch
Get in Touch
If you would like to find out more about me, my research or my work, please drop me an email. We welcome your comments and suggestions about this website and/or any other issues that you wish to raise.